Bring Up: CANifier
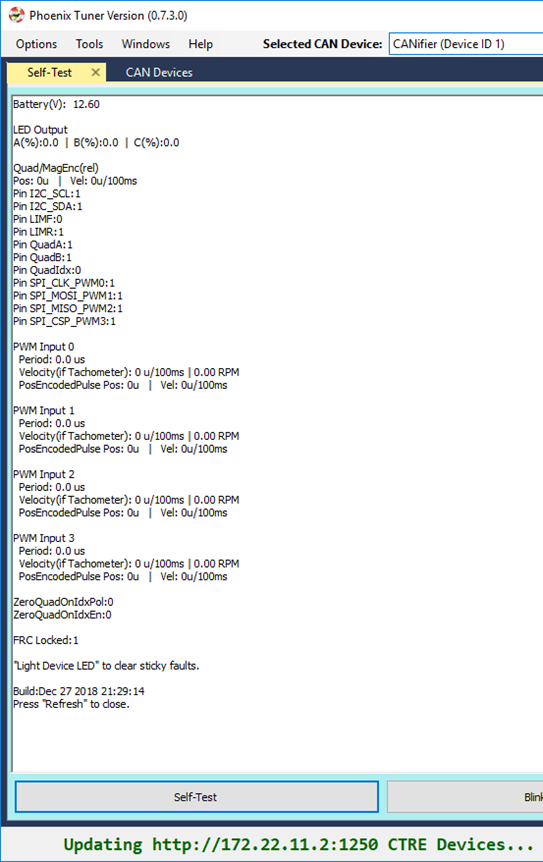
Phoenix Tuner
Using Self-test Snapshot, confirm all sensor inputs required by the robot application.
If using Limit switches, assert each switch one at time. Self-test Snapshot after each transition to confirm wiring.
If using Quadrature or Pulse width sensor, rotate sensor while performing Self-test Snapshot to confirm sensor values.
LED Strip Control
See CANifier user’s guide for wiring and controlling LED Strip.
CANifier API
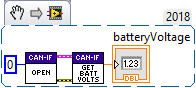
Create a CANifier object in your robot application and poll whatever sensor you have connected to it or the bus voltage
import com.ctre.phoenix.CANifier;
public class Robot extends TimedRobot {
CANifier _canifier = new CANifier(0);
int _loopCount = 0;
public void teleopPeriodic() {
if(_loopCount++ > 10)
{
_loopCount = 0;
System.out.println("Bus voltage is: " + _canifier.getBusVoltage());
}
}
Confirm output matches Self-test Snapshot results.