Bring Up: Pigeon 2.0
Warning
The Pigeon 2.0 Phoenix 5 API has been removed in 2025. Users should migrate to the Phoenix 6 library.
Power Boot
Pigeon 2.0 measurements can be obtained immediately after boot.
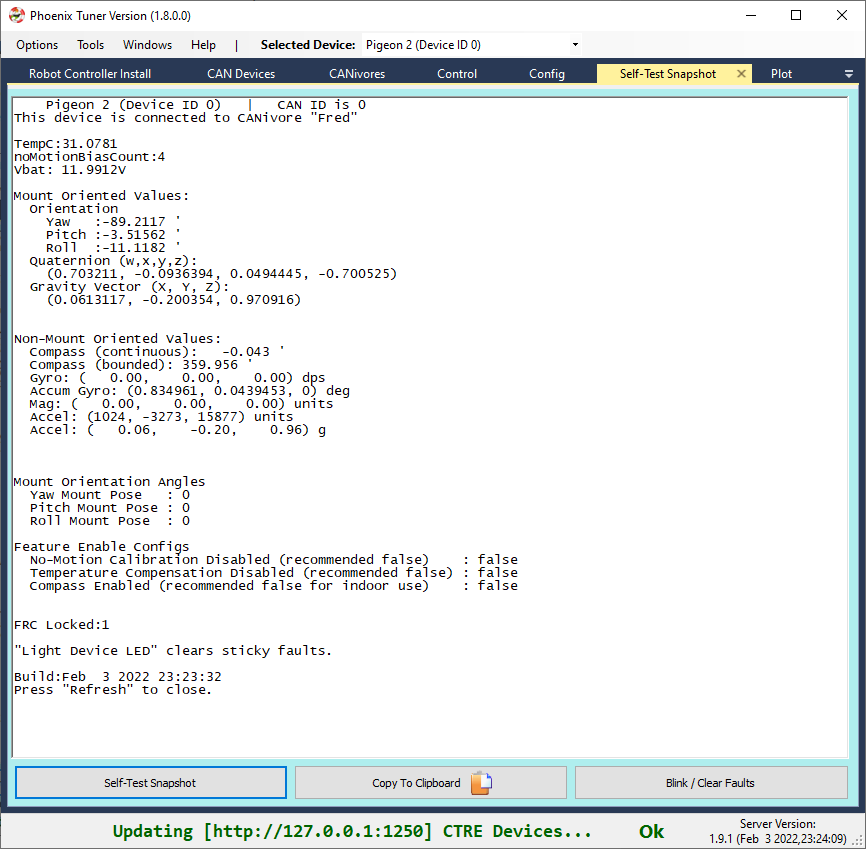
Phoenix Tuner
Open Phoenix tuner and use the Self-test Snapshot feature to confirm values. Rotate IMU and confirm Yaw moves as expected.
Tip
There is a modernized version called Tuner X that is available for Windows and Android devices (works with Phoenix 5 and Phoenix 6).
Note
Moving counter-clockwise is interpreted as a positive change.
Pigeon API
Create a Pigeon 2 object in your robot application and poll the Yaw value.
Note
Pigeon 2.0 uses a different class than Pigeon 1. It is named Pigeon2 instead of PigeonIMU.
import com.ctre.phoenix.sensors.Pigeon2;
public class Robot extends TimedRobot {
Pigeon2 _pigeon = new Pigeon2(0, "rio");
int _loopCount = 0;
public void teleopPeriodic() {
if(_loopCount++ > 10)
{
_loopCount = 0;
double yaw = _pigeon.getYaw();
System.out.println("Pigeon Yaw is: " + yaw);
}
}
Confirm that the output matches the Self-test Snapshot results.
If using LabVIEW plotter or SmartDash plotting, send the Yaw value into the plotted channel. Then confirm Yaw value provides a smooth curve while robot is rotated by hand.